Introduction
Cross-sectional measurement involves capturing the vertical shape of a pile's surface along its centerline, which is then used to create cross-sectional views for designing subgrades, slopes, special structures, earthwork calculations, and construction stakeouts. This process is essential in highway and railway projects due to the wide roadbeds, high design accuracy requirements, and dense vertical and horizontal sections, especially in mountainous areas where terrain changes are significant and walking is difficult. Traditional methods rely on collecting data points, which results in low efficiency, time-consuming re-measurement when the line changes, and a long design cycle that struggles to keep up with today’s fast-paced development.
In recent years, with China's rapid economic growth, drones have become increasingly popular across various industries, particularly in the geographic information sector. UAV aerial photography has revolutionized traditional surveying and mapping techniques. As a professional measuring drone, technologies like PPK, image-free control, and tilt photography improve image positioning and elevation accuracy. Software such as AgiSoft PhotoScan, PIX4D Mapper, and Smart 3D Capture now offer powerful image-to-point cloud matching capabilities. Point cloud data, as a new surveying product, holds great value in engineering applications. This paper presents a case study of a highway surveying project, using Sirius free image-controlled drone equipment combined with ultra-high-resolution imaging and both image-matching and LiDAR point cloud technologies to obtain dense ground elevation data. This approach replaces the most labor-intensive section measurements, significantly improving efficiency, reducing costs, and facilitating road rerouting, arbitrary section design, and BIM system integration.
1. Advantages of Drone Image Matching Point Cloud Technology
1.1 UAV Image Matching Point Cloud: A Product of Its Time
Image matching has always been a key topic in photogrammetry, remote sensing, and computer vision. It enables automatic identification of corresponding image points, facilitates aerial triangulation, and generates orthophotos. While traditional photogrammetry offers high precision, it is time-consuming and labor-intensive. LiDAR-based DEM generation is more automated but requires expensive equipment, limiting its widespread use. UAV image matching point cloud technology combines the best of both worlds, offering lightweight and efficient point cloud acquisition.
1.2 AgiSoft PhotoScan Multi-View Image Matching Enables Rapid Output of Massive Point Cloud Data
AgiSoft PhotoScan is a leading software for automatically generating high-quality 3D models from images. It doesn’t require initial values or camera calibration and uses advanced multi-view 3D reconstruction to generate real-world coordinate models. When paired with the high-precision Sirius UAV mapping system, it allows for fully automated one-click access to DOM, DEM, and raw point cloud data.
1.3 MAVinci Desktop Aerial Mapping System Offers Intelligent Flight Planning
MAVinci Desktop is a professional UAV flight control software that allows users to plan missions based on survey area scope or manually define target areas with specific GSD settings. It supports complex missions such as strip flights aligned with linear infrastructure and spiral flights covering large areas. The adaptive terrain relief mode ensures consistent image overlap and high-resolution ground images, laying the foundation for accurate point cloud generation.
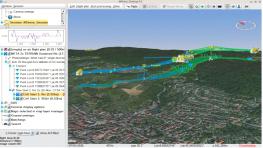
Figure 1: Strip and Adaptive Terrain Relief Flight Mode
1.4 Sirius SIRUS Pro UAV Enhances Image Point Cloud Matching in Production
The Sirius SIRUS Pro UAV is an innovative low-altitude remote sensing platform that complements traditional aerial photography. It offers fast response, high sensitivity, and ease of use. With RTK technology, it captures high-precision position data during image collection. By integrating precise timing and positioning, it eliminates the need for ground control points, achieving 5cm positioning accuracy even in free image control mode. This ensures accurate spatial relationships and lays the groundwork for high-precision image matching point clouds.
2. Engineering Case Study
2.1 Project Overview
This project involved cross-section measurements for a highway in Laiwu City, covering a route length of 85km. The average elevation was 210m, with a minimum of 170m and a maximum of 280m. Most of the survey area consisted of micro-hills and rugged terrain, with sparse orchards and bare land, making it ideal for noise removal in drone point cloud data. Technical requirements included collecting cross-section coordinates and elevation points at terrain slope changes.
2.2 Implementation Method
The project used a Sirius free image-controlled drone. The survey area was imported into MAVinci Desktop, with a GSD set to 3cm, and a strip flight plan with adaptive terrain relief mode. The flight height was 120m, with 80% forward and 65% side overlap. Each flight covered about 3km and lasted 30 minutes.
2.3 Testing and Validation
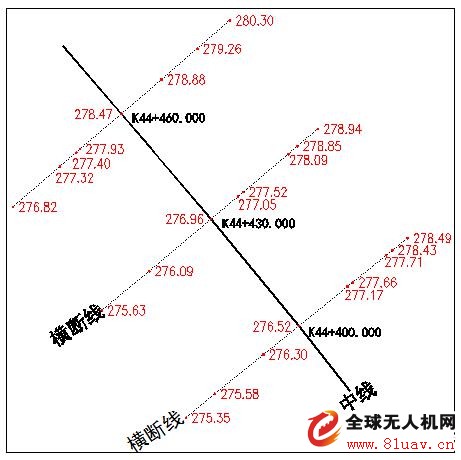
Figure 3: Traditional Section Measurement of Ground Elevation Points
The UAV image matching point cloud technology was tested over 1,000km of highway topographic surveys, showing high credibility. In this project, 5km of manual measurement lines were compared with three selected drone sections. The results showed slight deviations, which is normal given the different data acquisition methods.
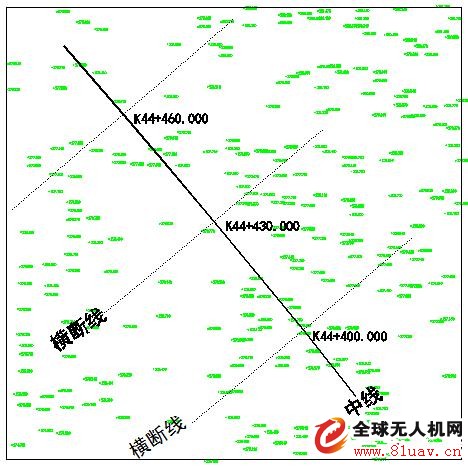
Figure 4: Using Drone Point Cloud to Obtain Ground Elevation Points
After overlay analysis of two cross-section lines (see Figure 5), it was observed that the results were mostly consistent, though there were minor differences. These variations are expected due to the nature of the two different methods.
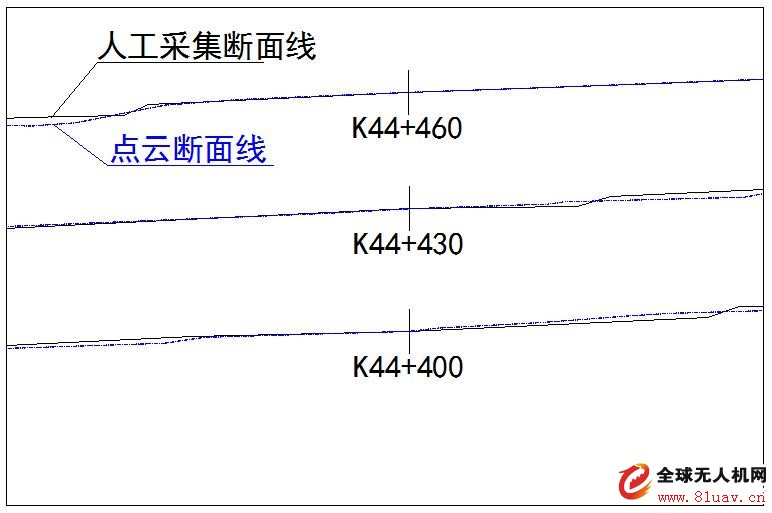
Figure 5: Two Cross-Section Line Overlay Analysis
3. Earthwork Calculation and Accuracy Analysis
3.1 Earthwork Calculation
DTM files were generated from two different data acquisition methods, and CASS software was used to compare earthwork calculations. For three sections between K44+400 and K44+460, the excavation volume was 366.6m³, filling was 265.7m³, and the balance was 99.9m³. The overall surface height change was about 3cm. Expanding the range to 30 sections between K44+220 and K44+500, the total excavation was 2723.8m³, filling was 2490.4m³, and the balance was 233.4m³, with a surface height change of about 11cm.
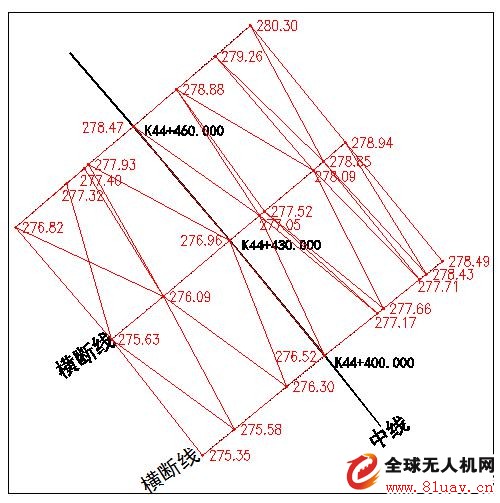
Figure 6: Creating a DTM Grid Using Measured Cross-Section Lines
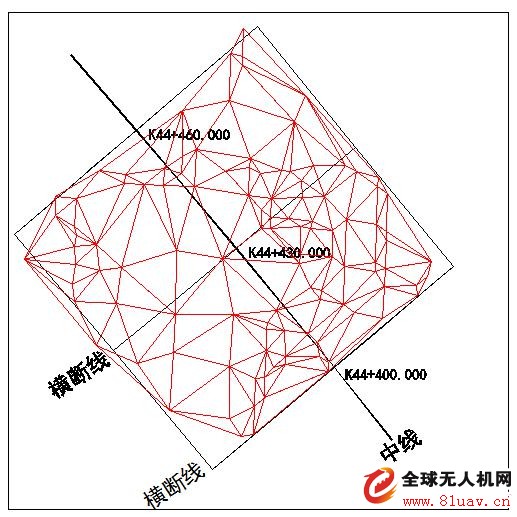
Figure 7: Creating a DTM Grid Using Point Cloud Data
3.2 Cross-Section Measurement Plan Comparison
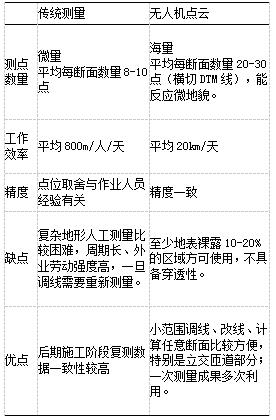
The two methods differ in how elevation points are collected. Traditional section measurement offers higher precision on specific lines but lacks data between them, leading to less accurate DTM models. Drone point cloud methods provide denser data, often at 2m x 2m spacing, allowing for highly accurate earthwork results with reliable point cloud data (see Table 1).
Table 1: Cross-Section Measurement Scheme Comparison
4. Conclusion
The high cost of onboard LiDAR equipment and complex data processing have limited its application. However, with technological advancements, civilian drones can now capture point cloud data at affordable prices. Although not as precise as airborne LiDAR, human-machine image matching point cloud technology shows great potential. Further research and optimization of point cloud classification algorithms are needed to improve usability. Using drone image matching point cloud instead of traditional section measurement provides a practical reference for similar engineering projects.

Constant Voltage Led Driver
Fahold, a 8 year old company brings light power to your life by illuminating your offices, factories, warehouses, shopping malls, airports, etc. with its high quality LED Linear lighting products and solutions. LED Linear lighting springs out few years ago, we see the power of the linear lighting solutions, so over the years, we have been innovating our 230vac to 24vdc power supply, 24v Ultra Slim Led Driver, 12v led power supply 5a driver for these type products to give you healthy low carbon environment with low energy consumption.
Application: LED Light boxes, led linear lights, led troffer ect.
Parameter:
Input Voltage:100-277V
Output voltage: 12V / 24V/36V/48V
Current: 1.6A /2.2A /2.5A /2.7A /3.3A /4.1A /5A /8A
Power factor: >0.95
THD: <15%
Dimming: 0-10V/PWM/RX/Dali
What's the benefits of Fahold Driver?
- Standard Linear Lighting
- Cost-effective led driver solution for industry,commercial and other applications
- Good quality of led driver with high efficiency output to meet different requirements
- Easy to order and install,requiring less time,reducing packaging waste and complexity
- Flexible solution
FAQ:
Question 1:Are you a factory or a trading company?
Answer: We are a factory.
Question 2: Payment term?
Answer: 30% TT deposit + 70% TT before shipment,50% TT deposit + 50% LC balance, Flexible payment
can be negotiated.
Question 3: What's the main business of Fahold?
Answer: Fahold focused on LED controllers and dimmers from 2010. We have 28 engineers who dedicated themselves to researching and developing LED controlling and dimming system.
Question 4: What Fahold will do if we have problems after receiving your products?
Answer: Our products have been strictly inspected before shipping. Once you receive the products you are not satisfied, please feel free to contact us in time, we will do our best to solve any of your problems with our good after-sale service.
24Vdc Power Supply,24V Ultra Slim Led Driver,12V Led Power Supply
ShenZhen Fahold Electronic Limited , https://www.leddriversupply.com