The widespread use of electronic devices in automobiles is considered a revolution in the development of automotive technology. With the development of automotive electronics technology and the increase of automotive control units, automotive electronics technology is moving towards centralization, intelligence, networking and modularization. The use of the CAN/LIN bus network in the car allows the data of the various control units in the vehicle to be shared, making it possible to use multi-variable and multi-target integrated coordinated control on the embedded computing platform of the vehicle. On the other hand, networkization has expanded the service field of automobiles, providing a technical basis for mobile communication, mobile office, entertainment, navigation and remote diagnosis and maintenance of automobiles, and gradually formed an interactive system of automobile, family and social integration. Automotive embedded computing platforms play an important role in this integrated system.
This article refers to the address: http://
This paper introduces the in-vehicle embedded computing platform, which provides a good software and hardware platform for auto-assisted driving and security monitoring, remote diagnosis and maintenance, online/offline navigation and positioning, entertainment, and home interaction. The following will explain the three aspects of the car/family/social integration architecture, the hardware platform of the computing platform, and the software system.
1 Automotive/family/social integration architecture
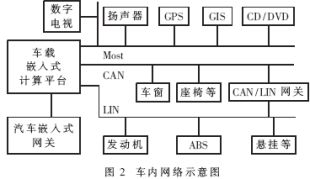
The automotive embedded computing platform provides a good software and hardware platform for implementing various functional services. The combination of the off-board network and the in-vehicle network constitutes an interactive architecture of car/family/social integration. The schematic diagram of the architecture is shown in Figure 1, and the schematic diagram of the in-vehicle computing network is shown in Figure 2.
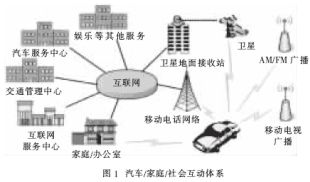
In Figure 1, the traffic management center, the automobile service center, the Internet service center, and the entertainment service center together form a vehicle remote service platform, and the home/office and automobile form a car/family interactive platform system. It mainly provides three types of services:
(1) Automotive integration services. It mainly refers to the vehicle remote diagnosis service and the vehicle optimal control program service. The automotive computing platform reads the fault code generated by the electronic control module (ECM) diagnostics via the CAN/LIN bus and then transmits it to the nearest automotive service center via the automotive gateway using wireless communication technology. The car service center analyzes the fault code to form a diagnostic plan and sends it to the car embedded gateway in the form of service. After the protocol is parsed, it is sent to the embedded computing platform of the car, and finally displayed to the driver through the man-machine interface. The car manufacturer also provides the car with the service to download the best car control solution to suit the car's operation under different driving conditions. These services are primarily provided by automotive remote service platforms or car manufacturers.
(2) Navigation and positioning services. The application layer software running on the embedded platform of the vehicle receives the data sent by the GPS receiver, and realizes navigation by means of the on-board geographic information system (electronic map). In addition, the application layer software can also send the data received by the GPS to the remote car service platform or a third-party service provider, and then the navigation information is sent to the car embedded platform in the form of service. These services are highly demanding in terms of accuracy and timeliness. How to accurately and efficiently deliver this information is the key to determining the quality of such services.
(3) Personal/entertainment information services. The car/family interactive platform system allows people to understand the situation at home while driving a car, connecting the car-family. The position of the telematics system is becoming increasingly prominent. It transmits security and confidential information or entertainment information to the car in a service manner through wireless communication technology.
2 Hardware architecture of automotive embedded computing platform
The design of the hardware platform must be determined based on the functions it is to perform. This project integrates the car embedded gateway into the computing platform. Therefore, the functions to be completed by the computing platform are mainly: wireless communication function with the remote service center; navigation function; audio and video playback function; access to the car through the CAN/LIN bus The function of the internal electronic control module. The EP9315 processor based on 32-bit ARM core has good computing power and rich peripheral interface. After making appropriate peripheral expansion, the car embedded computing platform shown in Figure 3 is designed.
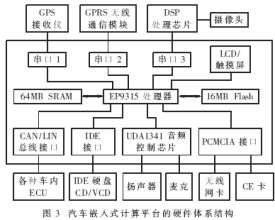
The EP9315 is a highly integrated system-on-chip processor. It has a 200MHz ARM920T processor and a Memory Management Unit (MMU) that supports Linux, Windows CE and many other embedded operating systems. The EP9315 includes a high-performance 1/10/100 Mbps Ethernet Media Access Controller (MAC) and external interface for SPI, I2S audio, Raster/LCD, IDE storage peripherals, keypads and touch screens. The device also integrates a three-port USB 2.0 full-speed host running at 12Mbps and three UARTs. The wireless network card of the PCMCIA interface provides access to the remote network and enables access to the remote service center network server. The IDE's electronic hard disk is used to store geographic information systems and provide electronic maps for navigation software. The GPS receiver is connected to the EP9315 processor through a serial port to provide real-time vehicle location information. The touch screen is a human-machine input interface for setting various user information. The LCD display and speaker are human-machine output interfaces that can play MPEG4 video or prompt voice alarm messages. The CAN/LIN bus interface can be connected to the CAN/LIN bus in the car to provide access to the CAN/LIN bus in the car. The software designed based on the above hardware platform can well complete the functions that the computing platform has to complete.
3 Software Architecture of Automotive Embedded Computing Platform
The software platform uses an embedded Linux design. The functions to be implemented in the software section have been described above. The navigation task is a real-time task, and Linux does not have real-time capabilities, so Linux needs to be improved to support real-time tasks. The software architecture based on real-time Linux is shown in Figure 4. 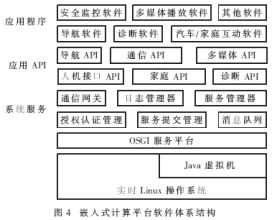
After the system is powered on, first start the LINux operating system, then start the QT engine, and then start the QT main program. The selection buttons for each application are displayed on the LCD display, and the corresponding application is launched by pressing the corresponding button on the touch screen. The following describes the execution flow of the main application.
(1) Navigation application. After the navigation program is launched, the user enters the starting and destination points of the journey through the touch screen. The navigation software sends the starting point and the destination point to the navigation service center (in this project is a computer in the wireless local area network), and calls the navigation API at a certain time to receive the real-time geography of the current vehicle sent by the GPS receiver from the serial port 1. The location data is then invoked by the communication API to send the geographic location data to the navigation service center via the wireless network card. The navigation service center calculates an optimal exercise path according to the received start and destination points of the journey, and each time the vehicle position information is received, the position of the current vehicle is calculated, and the current vehicle position and the path that should be exercised are included. The range of position images is sent to the vehicle. The navigation software on the car displays the received image on the LCD, through which the driver can know the current location of the vehicle and the route to be followed.
(2) Diagnostic application software. After the diagnostic service software is started, the software calls the diagnostic API to read the fault codes of the various ECUs connected to the CAN/LIN bus, and then calls the communication API to send the codes to the car service center (this project is the same as the navigation service center). Computer). The car service center analyzes the fault code, determines the specific fault condition of the car, and sends the final result to the embedded platform of the car through the wireless network. The car embedded platform receives the data through the wireless network card, and the diagnostic service software reads the data and displays it on the LCD.
(3) Automotive/family interactive application software. When running the home/automobile interactive system software on an automotive embedded platform, the software displays the various appliances in the home and their status on the LCD. When the user issues a command to change the state of an appliance via the touch screen, the car/home interaction software calls the home API function to send the command to the home gateway (provided by the social third party service company). Software running the OSGI protocol is run on the home gateway, which can complete the received commands and send the results of the execution to the car embedded platform.
(4) Security monitoring software. The CCD camera inputs the image of the driving lane of the car into the DSP processing system, and the DSP processing system analyzes the image data, and sends the analysis result to the security monitoring software running on the embedded platform of the automobile, and the monitoring software analyzes the data. If the car deviates from the driving lane, the monitoring software calls the multimedia API to alert the driver through the speaker or display information on the LCD, thus enabling safety monitoring and alarm functions.
material: Bergquist Thermal Clad HT-04503, Thermal Conductivity is 2.2W/m-K.With white soldermask and black silkscreen. surface finished is Hot Air Solder Level.Outline: rout and score and 100% E-test.used for LED indicator.
We have aluminium material with Thermal Conductivity 1W/m-K, 1.5W/m-K,2W/m-K, 2.2W/m-K. And we can produce single side&double side aluminium board

Aluminium Board
Aluminium Board,Aluminium Composite Panel Board,Aluminium Composite Panel,Custom Aluminium Board
Orilind Limited Company , http://www.orilind.com