**Introduction to Servo Drive**
Servo drives, also known as servo controllers or servo amplifiers, are essential components used to regulate the operation of servo motors. They function similarly to frequency converters used for standard AC motors and are integral parts of a complete servo system. These devices are primarily employed in high-precision positioning systems where accuracy is crucial. Servo motors can be controlled in three main modes: position, speed, and torque, enabling precise motion control in various applications. Today, servo drives represent advanced technology in motion control systems.
Servo drives play a vital role in modern automation, especially in industrial robots, CNC machines, and other precision equipment. In particular, those designed for controlling AC permanent magnet synchronous motors have become a major focus of research both domestically and internationally. Most current AC servo drive designs use three closed-loop control algorithms based on vector control: current, speed, and position. The design of the speed closed-loop is critical to the overall performance of the system, particularly in terms of speed control quality.
In a servo drive’s speed closed-loop system, accurate real-time measurement of the motor rotor speed is essential to enhance both dynamic and static performance. To balance cost and accuracy, an incremental optical encoder is typically used as the speed sensor, with the M/T method being a common approach for speed measurement. Although this method offers acceptable accuracy and a wide measurement range, it has some inherent limitations, such as requiring at least one full pulse from the encoder during the measurement period, which restricts the minimum measurable speed. Additionally, maintaining synchronization between the two timers used for speed measurement is challenging, especially when the speed fluctuates significantly. As a result, traditional speed loop designs often struggle to achieve optimal performance in high-speed or variable-speed applications.

**Servo Drive Principle**
Modern servo drives typically use a digital signal processor (DSP) as their central control unit, allowing for more complex control algorithms and enabling digitalization, networking, and intelligent operations. The power stage usually incorporates an Intelligent Power Module (IPM), which integrates the driver circuit along with built-in fault detection and protection mechanisms such as overvoltage, overcurrent, overheating, and undervoltage protection. A soft start circuit is also included in the main power supply to reduce the stress on the system during startup.
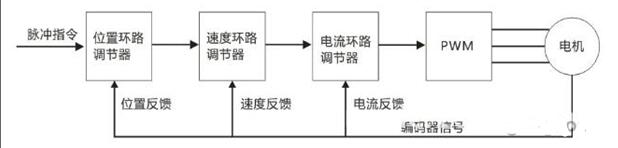
*Servo drive working principle diagram*
The power drive unit first rectifies the incoming three-phase AC or single-phase commercial power using a three-phase full-bridge rectifier, converting it into DC power. This DC power is then converted back into AC through a three-phase sinusoidal PWM inverter to drive the AC servo motor. This process can be summarized as AC-DC-AC conversion. The rectifier section typically uses a three-phase full-bridge uncontrolled rectifier circuit.
Servo drives support three primary control modes: position control, torque control, and speed control. In position control mode, the motor's rotation speed is determined by the frequency of external pulse signals, while the rotation angle is set by the number of pulses. Some advanced servos allow direct communication-based speed and displacement settings. Position control is ideal for applications requiring strict control over both speed and position, such as automated positioning systems.
Torque control mode allows external analog inputs or direct address assignments to set the motor's output torque. This torque can be adjusted in real time via analog settings or through communication protocols. It is commonly used in winding and unwinding systems, where maintaining consistent material tension is critical. The torque setting is adjusted dynamically based on the winding radius to ensure proper material stress.
In speed control mode, the motor speed is regulated through analog input or pulse frequency. While it can also be used for positioning with an upper-level PID loop, feedback from the motor or load position is required. In some cases, the position signal is obtained directly from the final load rather than the motor shaft, reducing transmission errors and improving overall positioning accuracy.
**Servo Drive Application**
Servo drives are widely used in industries such as injection molding machines, textile machinery, packaging systems, and CNC machine tools. Their ability to deliver precise motion control makes them indispensable in modern manufacturing environments.

**Servo Drive Selection**
Selecting the right servo drive involves considering several factors, including system requirements like size, power supply, power rating, and control mode. Before choosing a model, it's important to analyze these aspects thoroughly.
The type of motor supported by the drive should also be considered. Common motor types include DC brush, sine wave, and trapezoidal wave motors. The driver’s continuous output current must exceed the motor’s rated current, and its capability to handle the motor’s back EMF and maximum speed should be evaluated.
Feedback components are another key consideration. Depending on whether a closed-loop system is needed, different sensors like encoders, tachogenerators, or resolvers may be used. If the system already includes a feedback device, the driver must be compatible with that specific type of feedback.
Servo drives operate in three control modes: torque, speed, and position. Each mode has different command formats—torque and speed can be controlled via analog signals, while position control often uses pulse + direction signals. Bus-based control, such as EtherCAT, is also becoming increasingly popular.
System accuracy depends on multiple factors, including the servo drive itself. Digital servo drives offer high performance, while linear amplifiers provide low noise, high bandwidth, and distortion-free current zero crossing.
Power supply and environmental conditions are also important. Servo drives can be powered by either AC or DC sources, and the environment must be considered in terms of temperature and operating conditions. Protective enclosures may be necessary depending on the application.




Organic Light Emitting Display
Oled Display Module,Segment Led Display Module,Bendable Oled Flexible Displays,Tow-Color Oled Display Modules,OLED
ESEN HK LIMITED , https://www.esenlcd.com