Xinzhi Zaozhi: This article is an ICRA 2016 award-winning thesis, authored by Nicola Bezzo, Ankur Mehta, Cagdas Onal, and Michael T. Tolley, source Robohub, compiled by Xinzhi Zhizi and reprinted without permission!
Although great progress has been made in the design and manufacturing of technology in recent years, making the development of functional robots easier and easier, but to build fully functional robots, the road ahead is still facing enormous challenges. Creating a mature robotic system requires exquisite technologies in different fields (including mechanics, electronics, software and control theory, etc.). Once these areas have achieved outstanding results, the maturity of the robot system will be further advanced.
The purpose of the robot system design is to obtain a complete manufacturing process for the manufacturing robot, which includes structure, mechanical manufacturing, and assembly. Research in this area will help users derive manufacturing processes from specific types of structures and functions. Design for manufacturability (DFM) limits the functionality and structure of robots due to the immature manufacturing techniques. With the increase of manufacturing capacity, these restrictions can gradually reduce until disappeared. For example, with the development of 3D printing technology, solid objects of almost any shape can now be manufactured using a 3D printer.
However, in addition to 3D printing, we have other technologies. A recent example is the technique of folding 2D materials together, similar to the Japanese origami process. Now, some research teams have used this technology to make paper, plastic film and multilayer laminates into robots. This method has unparalleled advantages of other methods: First of all, its manufacturing process is fast; in addition, it is very flexible. However, there are still many challenges in making 2D materials into 3D structures.
In addition to considering the structural part, the robot design also considers the electronic and software system parts.
Manufacturing TechnologyTo realize the rapid manufacture of robots, new additive manufacturing is crucial. 3D printing technology extends the equipment we can directly manufacture, from the speaker to the battery, to the strain sensor, 3D printing can be wiped out. Recently, our team began to explore the materials, programs, and design methods that can be used for 3D printing to increase the scope of 3D printing. In addition to 3D printing, another technique available for robot manufacturing is shape deposition manufacturing (SDM). The principle is that parts and supports are generated synchronously on a layer-by-layer basis, and the newly added materials are liquid materials. After each layer is completed, Machining and stress relief processing under computer control are superimposed until the parts are created.
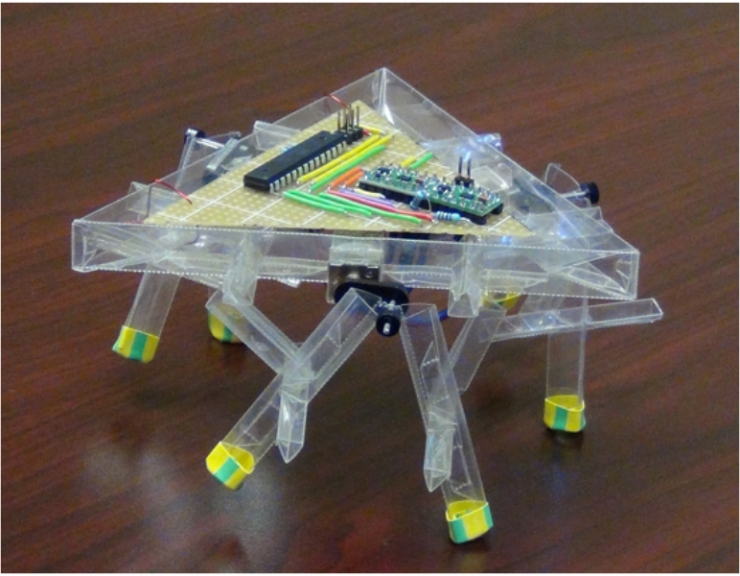
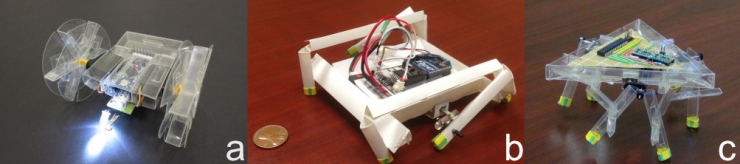
Recently, a team has developed a program called PC-MEMS (printing loop MEMS) that can be used to fabricate electromechanical laminations that can be used to make robotic systems. This method is now used to make walking and flying insect-shaped robots.
 Software Environment
Software Environment Software plays an important role in the design and manufacture of robotic systems. In terms of design, many tools can now help users by creating, drawing mechanical, electronic, and software. Software should support design and simplify the design process as much as possible to protect the final product.
Using the robot operating environment (ROS), we have built a modular programming environment for robotics applications, which we named ROSLab. With ROSLab, developers can use a large number of computing units in robotics applications and modularize the messaging between these units. This way, we can fully automate the creation of a mainframe framework code for robot applications. Recently, we added the robot building block library to ROSLab and continued to grow ROSLab to create a better design environment for the robot's mechanical structure.
From an electronic point of view, we need to apply two major symbiosis concepts: one is a modular approach, and the other is an embedded printing plate. Both methods have their own advantages and disadvantages. Loops created using the modular approach are reusable, easy to test, and able to perform specific tasks supported by groups of manufacturers such as Arduino and Sparkfun. However, because it connects more connectors, it is larger and heavier. At the same time, the cost is more expensive. The embedded printing plate can be customized, so its advantage in size and weight is obvious, which is why it has been widely used in the manufacture of small robots.

The above summarized techniques and software can be used for rapid manufacturing of robotic systems. However, to make the design scheme consistent with the final product, we also face enormous challenges. Therefore, in the design and manufacturing process, we need to repeatedly confirm that the finished product meets the designer's requirements.
However, at present, prototype systems have become more and more cheap, which greatly reduces the need for confirmation in the design process. Now, we can confidently and boldly use various methods to test and constantly try to find out the mistakes until the final correct results are obtained. Sometimes this method is also an economic and feasible solution.
Next, we talk about on-demand robots. In short, it is a kind of customized robot. Nowadays, there are two opinions in the industry for customized robots. Some people support the development of this robot, thinking that it allows users to develop their own unique robot. Some people think that the existence of such a robot is actually not necessary. They think that the industry's focus should be on the ability to expand the robot manufacturing process, so that we will have more universal robots. However, the industry recognizes that more and more tasks will be accomplished by future robots.
We believe that the above listed technologies and software will have a significant impact on the robot manufacturing field.
First of all, they are not only suitable for customized robots, but also for general robots. Researchers can select specific methods according to their specific categories.
Second, regardless of which method is chosen, they are more cost-effective than traditional robotic manufacturing methods.
In addition, as robots expand into more fields (such as expanding into the field of artistic creation), more and more people have asked a question: How can robots have a positive impact on humans? Now, we have studied some robots that can benefit humans (such as agricultural robots, medical robots, etc.) to create more robots that serve humans. The above mentioned methods and software will have a tremendous impact on creating robots that are affordable, easy to manufacture, and beneficial to humans.
Finally, they also have educational significance and encourage more younger generations to become robotics scientists and engineers.
Via:Robohub
Xinzhi created the public number of the robot under the leadership of Lei Feng Network (search for "Lei Feng Net" public number) . We are concerned about the status quo and future of robots, and related industries combined with robots. Interested friends can add micro signal AIRobotics, or directly scan the QR code below to follow!
